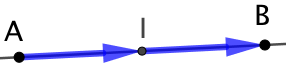
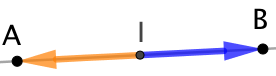
I – Milieu
 et
et  . Les propositions suivantes sont équivalentes :
. Les propositions suivantes sont équivalentes :
- Le point
 est le milieu du segment
est le milieu du segment ![[AB]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-9fd566b0e28516ed5c7d24192dac3fe1_l3.png "Rendered by QuickLaTeX.com") ;
;  ;
; ;
; ;
;
Démonstration :
 1ère partie : Supposons que le point soit le milieu du segment . Alors nous en déduisons que :
1ère partie : Supposons que le point soit le milieu du segment . Alors nous en déduisons que :
- les points , et sont alignés, donc les vecteurs
 et
et  ont la même direction.
ont la même direction.  (égalité de distance), donc les vecteurs et ont la même norme.
(égalité de distance), donc les vecteurs et ont la même norme.
Et ils ont évidemment le même sens. Donc .
 2ème partie : Supposons que .
2ème partie : Supposons que .
Alors  .
.
Donc  . Ce qui donne :
. Ce qui donne :
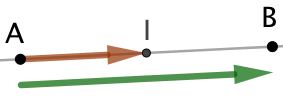 3ème partie : Supposons .
3ème partie : Supposons .
Alors la relation de Thales appliquée à donne :  .
.
Donc  , soit
, soit  .
.
On obtient après simplification :  .
.
4ème partie : Supposons . On en déduit que :
 (égalité de longueur)
(égalité de longueur)- les vecteurs
 et sont colinéaires, donc les points , et sont alignés.
et sont colinéaires, donc les points , et sont alignés.
Cela permet d’affirmer que le point I est le milieu du segment .
II – Coordonnées d’un vecteur
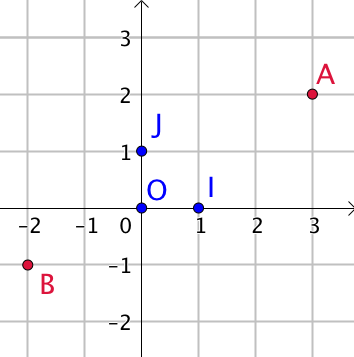 Un repère orthonormé est constitué de trois points
Un repère orthonormé est constitué de trois points  , et
, et  tels que les droites
tels que les droites  et
et  soient perpendiculaires et tels que
soient perpendiculaires et tels que  . La longueur
. La longueur  est définie comme l’unité de mesure du repère.
est définie comme l’unité de mesure du repère.
- La droite est l’axe des abscisses, c’est l’axe horizontal.
- La droite est l’axe des ordonnées, c’est l’axe vertical.
Le repère est noté : 
Tout point du plan est repéré de manière unique grâce à ses deux coordonnées appelées abscisse et ordonnée.
Exemples:
- Les coordonnées du point sont

- Les coordonnées du point sont

 . On pose
. On pose  et
et  . Le couple
. Le couple  est appelé base orthonormée.
est appelé base orthonormée.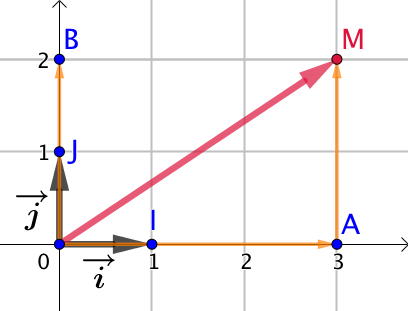 Exemple :
Exemple :
Soient les point  ainsi que les points
ainsi que les points  le projeté de M sur l’axe des abscisses et
le projeté de M sur l’axe des abscisses et  le projeté de M sur l’axe des ordonnées.
le projeté de M sur l’axe des ordonnées.
On a l’égalité : 


Donc 
On dit que les coordonnées du vecteur  dans la base sont
dans la base sont  et
et  .
.
On observe que les coordonnées du point  et du vecteur sont identiques.
et du vecteur sont identiques.
Remarque : Que ce passe-t-il si le vecteur n’a pas le point O comme origine ?
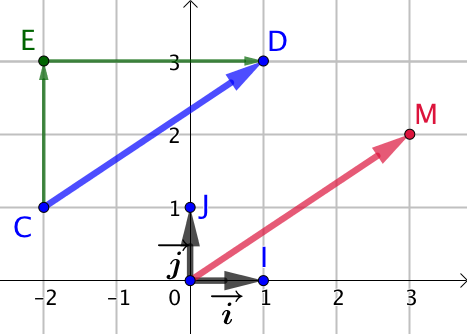 Exemple :
Exemple :
Soit le vecteur  égal au vecteur . Alors on doit s’attendre à ce que les coordonnées de soient
égal au vecteur . Alors on doit s’attendre à ce que les coordonnées de soient  . Ce que l’on va vérifier.
. Ce que l’on va vérifier.

 et
et  .
.
Par conséquent  . On retrouve les coordonnées de .
. On retrouve les coordonnées de .
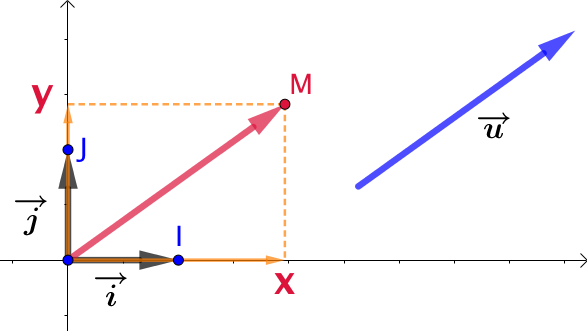
Pour tout vecteur  , il existe un couple unique de réels
, il existe un couple unique de réels  tels que
tels que 
 et
et  sont les coordonnées du vecteur dans la base orthonormée
sont les coordonnées du vecteur dans la base orthonormée
Cas particulier : les coordonnées de  sont
sont  .
.
 Démonstration :
Démonstration :
Soit le repère orthonormé  tel que
tel que  et
et  .
.
Existence de et de :
Soit un vecteur et soit un point tel que  .
.
Soit et les coordonnées du point dans la repère . Alors on sait montrer que  .
.
Donc  .
.
Unicité de et de : Supposons que 
Soient les points et  tels que
tels que  et
et 
Alors  donc
donc  . Si ces deux points sont confondus, leurs coordonnées sont égales, donc
. Si ces deux points sont confondus, leurs coordonnées sont égales, donc  et
et  .
.
Pour tous vecteurs  et
et  , et pour tout nombre réel
, et pour tout nombre réel  :
:
- les coordonnées du vecteur
 sont
sont  .
. - les coordonnées du vecteur
 sont
sont  .
.
Cas particulier : si les coordonnées de sont alors les coordonnées de son opposé,  sont
sont 
Démonstration :
On sait que et que 
![\[ $\overrightarrow{u} + \overrightarrow{v} = x \overrightarrow{i} + y \overrightarrow{j} + x' \overrightarrow{i} + y' \overrightarrow{j} = x \overrightarrow{i} + x' \overrightarrow{i} + y \overrightarrow{j} + y' \overrightarrow{j} = (x + x') \overrightarrow{i} + (y + y')\overrightarrow{j} \]](http://www.rozenblum.com/wp-content/ql-cache/quicklatex.com-3c8f9517fcff0239cc3dfd2fb67a6095_l3.png "Rendered by QuickLaTeX.com")
Ce qui démontre que les coordonnées du vecteur sont
 .
.
Ce qui démontrer que les coordonnées du vecteur sont .
Si on remplace par  , on démontre que les coordonnées de
, on démontre que les coordonnées de  sont
sont
Dans la suite de ce chapitre, les points sont repérés par un repère orthonormé  et les vecteurs par une base orthonormée , telle que et
et les vecteurs par une base orthonormée , telle que et
 et
et  , les coordonnées du milieu du segment sont
, les coordonnées du milieu du segment sont  .
.
Autrement dit les coordonnées du milieu d’un segment sont les demi-sommes des extrémités de segment.
Démonstration :
Soit le milieu de [AB]. Nous savons que .
La relation de Chasles appliquée à donne :  .
.
Après développement, il vient :  , soit
, soit 
La relation de Chasles appliquée à donne :  .
.
Sachant que  , on obtient :
, on obtient :  .
.
Les coordonnées de  et de
et de  sont respectivement
sont respectivement  et
et  , donc celles de
, donc celles de  sont
sont  qui sont aussi les coordonnées de
qui sont aussi les coordonnées de 
Finalement nous trouvons que les coordonnées de  sont
sont
et , les coordonnées du vecteur sont  .
.
Autrement dit les coordonnées de sont obtenues par les différences entre les coordonnées de l’extrémité du vecteur, le point , et l’origine du vecteur, le point .
Démonstration :
Les coordonnées du vecteur  sont les coordonnées du point , soit .
sont les coordonnées du point , soit .
On sait que  . Donc les coordonnées du vecteur
. Donc les coordonnées du vecteur  sont
sont  .
.
La relation de Chasles appliqué à donne :  .
.
Donc les coordonnées de sont obtenus en faisant la somme des coordonnées de  et de , soit
et de , soit  , c’est-à-dire .
, c’est-à-dire .
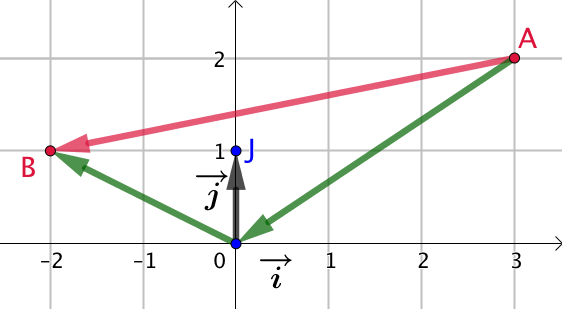 Exemple :
Exemple :
 et
et 
On fait la différences entre les coordonnées de et celles de :
- L’abscisse de est

- L’ordonnée de est

Donc 
Interprétation géométrique : Pour passer du point au point , on se déplace « à gauche » de 5 unités, puis on « descend » d’une unité.
et , la distance AB ou la norme du vecteur est  .
. Démonstration :
Soient les points  et
et  projetés orthogonaux de sur l’axe des abscisses et l’axe des ordonnées, et soient les points
projetés orthogonaux de sur l’axe des abscisses et l’axe des ordonnées, et soient les points  et projetés orthogonaux de sur l’axe des abscisses et l’axe des ordonnées. Soit
et projetés orthogonaux de sur l’axe des abscisses et l’axe des ordonnées. Soit  le point d’intersection des droites (AK) et (BL).
le point d’intersection des droites (AK) et (BL).
Par construction le triangle  est rectangle en .
est rectangle en .  est égale à la distance AB qui vérifie le théorème de Pythagore :
est égale à la distance AB qui vérifie le théorème de Pythagore :  .
.
Nous voyons que  . Nous savons par ailleurs que la distance séparant deux points d’une droite numérique est la valeur absolue de la différence de leurs abscisses.
. Nous savons par ailleurs que la distance séparant deux points d’une droite numérique est la valeur absolue de la différence de leurs abscisses.
Comme et sont les projetés orthogonaux respectifs de et sur l’axe des abscisses, leurs abscisses respectives sont  et
et  . Par conséquent
. Par conséquent  .
.
 . On démontre de la même façon que
. On démontre de la même façon que  .
.
Ce qui donne :  .
.
Rappel sur les valeurs absolues : pour tout réel ,  . Donc
. Donc 
Ce qui donne par passage aux racines carrées :  .
.
,  .
. Démonstration :
Soit le vecteur de coordonnées . On sait qu’il existe un point possédant les mêmes coordonnées que , tel que  .
.
D’après la propriété précédente :  .
.
Comme les coordonnées du point , origine du repère, sont et que  , il vient que
, il vient que  .
.
et  , leur déterminant est l’expression :
, leur déterminant est l’expression :  .
.Exemple : soient les vecteurs  et
et  . Leur déterminant est :
. Leur déterminant est :  .
.
et sont colinéaires si et seulement leur déterminant est nul.Démonstration : Soient deux vecteurs et .
1ère partie : Supposons que les deux vecteurs soient colinéaires.
Alors il existe un nombre réel tel que  .
.
Ce qui signifie que  et que
et que  . Donc
. Donc 
2ème partie ( réciproque) : Supposons que  alors
alors  . (1)
. (1)
1er cas :  et
et  . L’égalité (1) devient :
. L’égalité (1) devient :  puis
puis  .
.
On pose  , ce qui donne :
, ce qui donne :  et
et  . Donc
. Donc  . Les deux vecteurs sont colinéaires.
. Les deux vecteurs sont colinéaires.
2ème cas :  . L’égalité (1) devient
. L’égalité (1) devient 
 . Alors
. Alors  et
et  sont colinéaires puisqu’ils ont la même direction verticale.
sont colinéaires puisqu’ils ont la même direction verticale. . Alors
. Alors  . Tous les vecteurs sont colinéaires au vecteur nul. C’est donc le cas de
. Tous les vecteurs sont colinéaires au vecteur nul. C’est donc le cas de  .
.
3ème cas : . L’égalité (1) devient 
 . Alors
. Alors  et
et  sont colinéaires puisqu’ils ont la même direction horizontale.
sont colinéaires puisqu’ils ont la même direction horizontale.- . Alors . Tous les vecteurs sont colinéaires au vecteur nul. C’est donc le cas de
